題 目:
基于單片機的超聲波清洗機的設計
系 別: 信息與控制學院
專 業: 測控技術與儀器
學生姓名: 閆圣坤
指導教師: 耿欣
2011 年 6 月 15 日
摘 要
超聲波清洗始于20世紀50年代初,隨著技術的進步應用日益擴大。目前已廣泛地用于電子電器工業、清洗半導體器件、電子管零件、印刷電路、繼電器、開關和濾波器等;機械工業中用于清洗齒輪、軸承、油泵油嘴偶件、燃油過濾器、閥門及其他機械零件,大如發動機及導彈部件,小如手表零件;再如光學和醫療器械方面用于清洗各種透鏡、眼鏡及框、醫用玻璃器皿、針管和手術器具等。
此次設計的
超聲波清洗機主要應用于對印制電路板等表面復雜的器件進行清洗,本設計以單片機為核心器件,可以通過按鍵對清洗時間進行設定,通過LED數碼管進行倒計時顯示。該產品是一種機電產品,通過壓電陶瓷材料做成的超聲波換能器將超聲頻電振蕩轉變成機械振動,在液體中產生超聲波振動進行清洗。利用超聲波可以穿透固體物質而使整個清洗介質振動并產生空化氣泡,該清洗方式對任何生活用具不存在清洗不到的死角,且清洗潔凈度非常高。本系統運行可靠,實用性強,具有一定的使用價值和意義。
關鍵詞:單片機;超聲波換能器;清洗機
Abstract
Ultrasonic cleaning the 20th century began in the early 50s, with the development of technology application widening. At present already widely used in electronic industry, cleaning semiconductor devices, valve parts, printed circuit, relays, switches and filters, etc.; Mechanical industry for the cleaning gears, bearings, oil, pump glib accidentally pieces, fuel filter, valves and other mechanical parts, as big as a engine and missile components, small as watch parts; Be like again optical and medical devices used for washing various aspects lens glasses and box, medical glassware, needle and surgical tools, etc.
The design of ultrasonic cleaning machine is mainly used in printed circuit board surface complex devices such as cleaning, this design based on singlechip device, can pass keys for cleaning time Settings, through LED digital tube countdown show. This product is a kind of mechanical and electrical products, through the piezoelectric materials made of super audio ultrasonic transducer electrical oscillation transformed into mechanical vibration, produce ultrasonic vibration in liquid cleaning. Using ultrasonic can penetrate through the solid material and make whole cleaning medium vibration and generate cavitation bubbles, the cleaning method for any life appliance does not exist, and less than one-off wash clean cleanliness is very high. This system run reliably, practical strong, has some use value and meaning.
Keywords: Microcontroller, Ultrasonic transducer, Cleaning machine
目 錄
1 緒 論 1
1.1 設計的背景及意義 1
1.2 超聲波的產生方式 3
2 系統論述 5
2.1 超聲波清洗的原理和特點 5
2.2 超聲波清洗機的結構和參數設定 6
3 系統的硬件設計 7
3.1 單片機外圍電路設計 7
3.1.1 單片機設計方案比較 7
3.1.2 STC89C52單片機的特點 8
3.1.3顯示與鍵盤電路的設計 11
3.2 超聲波發生器的選擇 13
3.3 超聲波振蕩器設計 14
3.4 高頻驅動和匹配電路 15
3.5 超聲波換能器設計 16
3.6 清洗槽的設計 17
4 綜合調試 19
4.1 軟件調試 19
4.2 硬件調試 21
結 論 26
致 謝 27
參考文獻 28
附錄A 英文原文 29
附錄B 譯 文 35
附錄C 系統設計原理圖及PCB圖 39
附錄D 程序清單 41
附錄E 元器件清單 54
附錄F 系統設計實物圖 55
1 緒 論
1.1 設計的背景及意義
目前,由于環境保護的要求,使用清洗劑逐漸成為眾多廠家的**,這就需要與超聲清洗配合才能取得更好的效果。
近10年來,
超聲波清洗設備正在朝兩個方面發展。其一是,各種類型的多缸或傳動鏈式或升降式超聲清洗生產線相繼面市;其二是,低頻超聲波清洗機向高頻超聲波清洗機的發展。在美G、日本、歐洲以及亞太市場上,多缸式
超聲波清洗設備總量已呈明顯上升之勢,高達總量的50%,而多工位半自動、全自動傳動鏈式或升降式超聲波清洗線體設備也已上升到總量的40%以上。#p#分頁標題#e#
我G超聲波清洗技術的應用已經取得了較好的成效。一是機械零部件在電鍍前后的清洗或噴涂前的清洗,拆修零部件的清洗,要求高清洗度,如油泵油嘴偶件、軸承、制動器、燃油過濾器、閥門的清洗。二是印制電路板、硅片、晶片、元器件殼、座、鐵路系統用的信號控制繼電器、元器件、連接件、顯像管以及電真空器件等的清洗。三是眼鏡、顯微鏡、望遠鏡、瞄準具等光學系統及取樣玻璃片的清洗。四是醫用器具、食品、制藥、生化等試驗中所用各種瓶罐的清洗。五是噴絲頭、精密模具、精密橡膠件、珠寶工藝品等的清洗。
我G現有各類
超聲波清洗設備制造企業近40家,但其分布主要集中在東南沿海地區。據統計資料,沿海地區的廠家占全G總數的85%,可見經濟發達地區對超聲波清洗技術的應用不但在先,而且廣泛,普及程度高,同時,這又證明超聲波清洗技術在中西部地區推廣普及的前景十分廣闊。就產品水平而言,當代產品與20世紀70—80年代的產品相比,技術進步也十分明顯。
近年來,由于對汽車制動器生產線、冰箱壓縮機生產線的傳統清洗工藝實行技術改造,擬采用超聲波清洗工藝。在G外汽車底盤架、轎車外殼噴涂前的超聲波清洗,配合專用清洗液,將除銹、去氧化膜及磷化一次清洗處理完成,烘干后即可噴漆等都有了新的應用和發展。
美GDvpont公司在新澤西州制藥廠的應用報告稱:超聲波清洗能除去反應罐或化學處理桶殼表面的污物,比用普通方法節約能源,費用低且減少環境污染,清洗過程簡單,只要在容器中灌滿水,加熱到65℃,并加入2%的表面活性劑,進行處理2—4h,即可清洗干凈。
歐洲的一些廠家曾清洗過各種的罐,以前用甲醇加熱到沸點一次處理4—8h,總共要進行5次清洗才能達到要求,而且超聲波清洗只需要一次處理即能達到要求,既節省溶劑,提高效率,又減少環境污染。隨著超聲波清洗設備的應用范圍越來越廣泛,各種經過不斷完善和改進的新穎超聲波清洗設備正在取代已面市的老式設備。
兆赫超聲波清洗技術是指采用頻率700kHz—2MHz的超聲波進行清洗。清洗系統一般由壓電換能器、清洗容器和清洗液、高頻電功率發生器及控制電路等組成,對于某些特定的清洗對象,有時還配有熱空氣烘干、專用清洗架及清洗液的過濾循環系統。兆赫超聲波清洗技術的主要特點,一是避免了高光潔度物體的表面損傷;二是可除去附著在表面的亞微米大小的顆粒;三是浸入液體中,面向換能器的一面能被洗凈,所以要進行兩面清洗。
目前,G外市場上已有商用的兆赫超聲波清洗設備。美GVerteq、Imtec、ProSys公司已開發出這類設備用于半導體生產線上,在對100—300mm硅片的清洗中,可除去硅片表面上小到0.15μm的微小顆粒,而且可加快漂洗過程并有效地阻止粒子在硅片表面上重新附著。兆赫超聲波清洗是G外許多大規模集成電路制造廠家生產過程中不可缺少的標準設備。
超聲波的作用原理
超聲波清洗的原理,在理論要加以闡述是比較復雜的,里面牽涉許多因素和作用,可以體現超聲波清洗作用的主要有以下三點。
(1)空穴作用
當強力的超聲波輻射到液體中,清洗液以靜壓(一個標準氣壓)為中心進行變化,在壓力到零氣壓以下時,溶解在液體中的氧會形成微小氣泡核,進而產生無數近似真空的微小空洞(空穴)。超聲波的正壓力時的微小空洞,在jue熱壓縮狀態被擠碎,這個發生在擠碎瞬間的強力沖擊波,可直接破壞污染物并使之分散在液中,形成清洗機理。試驗中這種強力的清洗作用,能在數十秒內對鋁箔侵蝕成無數的小孔。
(2)加速度
清洗液體經超聲波輻射,液體分子發生振動,這種振動加速度在28kHz時是重力加速度的103倍,在950kHz時將達到105倍,由這個強力加速度可以對受污物的表面實行剝離清洗。然而,950kHz的超聲波不產生空穴,不適應去油污的清洗,只能在電子工業的半導體制造中,對亞微米粒子的污染進行清洗。
(3)物理化學反應的促進作用
由空穴作用使液體局部發生高溫高壓(1000氣壓,5500℃),再經振動產生的攪拌,促使發生化學或物理作用,液體不斷地乳化分散,進一步促進化學反應的速率。
1.2 超聲波的產生方式
連續振蕩振幅及頻率是固定的可強力清洗。由駐波作用使清洗不均,應增加搖動,達到清洗均勻性。加寬調制振幅變化有良好的脫氣效果,對不同物體清洗性好,噪聲大。
頻率調制(FM振蕩) 振蕩頻率實行數千赫的變化 能均勻地清洗。清洗效率差,平均輸出功率低。清洗均勻,不易得到強力的超聲波。不易得到強力清洗。圓錐形輻射清洗 用不銹鋼制成的共振體進行超聲波輻射。一般在清洗不充分場合使用 可獲得常規超聲波10倍或20倍的強度,性能高。 但清洗面小,噪聲大。
清洗條件的選擇設定主要有以下特點:
清洗位置:將清洗物置于駐波壓力**大的位置,可獲得**佳的清洗效果。但是比駐波大的物體清洗時,易產生清洗不均,這時應將物體在上下數十毫米內加以搖動,這是減少清洗不良的常用方法。#p#分頁標題#e#
由網孔引起的衰減:在清洗小型物件時,多使用網籃方式,網籃網孔的大小不當,會造成超聲波衰減,使清洗力降低,例在28kHZ場合,網籃的網孔直徑需在5mm以上,才可正常清洗。如小的螺釘清洗時,網孔**小要做到1mm,如果衰減大,使用0.1-0.5mm的薄板網藍,也可得到正常清洗效果。
頻率:對于頻率因素涉及的清洗效果,大體可這樣認為,采用頻率低的針對較難清洗的污垢,頻率高的,適合于精密清洗場合。
液體溫度:隨著液溫的上升,液中生存的氣泡會遮斷聲波,使超聲波減弱,但是在常規做法上都以提高液溫來增加清洗能力。適合的液溫要針對不同的清洗液和清洗物來確定。
清洗工序和清洗裝置
清洗工序的設定要根據污染的類型,污染程度,處理批量來決定,譬如,眼鏡片的清洗一般要10個工序。在使用水系清洗劑時,**基本的工序制定如下:
超聲波清洗(水系清洗劑)→超聲波清洗(純水、自來水)→脫水 (干燥)
干燥處理對清洗物的清洗性優劣非常重要,常見的干燥方法有熱風干燥、通風干燥、真空干燥、離心脫水干燥、IPA提升干燥等,可按照生產批量、成本、產品精度、被洗物形狀等加以選擇。
工業用超聲波清洗機多為單槽或雙槽式、自動清洗形式的清洗機也有多槽形式。近年來,半導體行業用的清洗方式大多采用帶950kHz超聲槽的單枚式“US噴淋”高頻清洗,可得到高性能的清洗結果,“US噴淋”的方式是將載有950kHz超聲波所形成的水帷幕,用于液晶玻璃、電路芯片的超精密清洗,塵粒子可接近“零”的程度。
今后不同產品的濕式清洗,如需100%地發揮清洗劑的性能作用,對超聲清洗裝置將會提出更高的要求。
2 系統論述
超聲清洗是利用超聲波在清洗液中的空化作用、加速度作用及直進流作用,產生的沖擊,將浸沒在清洗液中的工件內外表面的污物震落剝離下來。目前常用的超聲波清洗機中,以空化作用和直進流作用為主。超聲波清洗機主要應用于電子、光學和醫療*域,用來清洗半導體器件、印制電路板玻璃器具等超聲波清洗機由超聲波發生器、超聲波換能器、超聲清洗槽及控制電路組成。超聲波清洗機主要利用超聲波發生器產生超聲波信號并傳入超聲波換能器,超聲波換能器將超聲波電能轉換為高頻機械振動并傳入清洗液中,在清洗液中產生空化作用,從而達到超聲波清洗的目的。
超聲波清洗機控制的關鍵是頻率跟蹤,也就是使超聲波電源輸出頻率和換能器頻率一致,這樣才能形成共振,使換能器處于**佳工作狀態,清洗效果**好。目前,常用的頻率跟蹤技術采用鎖相環方式,該方法簡單易實現,跟蹤效果好,但功能單一。本文采用單片機實現全數字控制,以便于設置相關參數。該機的主要功能有頻率自動跟蹤、功率調節、振蕩工作方式、掃描工作方式、定時功能。
超聲波是一種超過人類聽力頻率范圍的聲波,具有頻率高、方向性準、穿透能力強等特點,廣泛應用于清洗、距離測量、醫學等*域。超聲清洗始于20世紀50年代初,開始主要用于電子、光學和醫藥等*域,作為一項實用性很強的技術,其應用場所廣泛,涉及到大的機械零部件,小半導體器件的清洗等,常常稱作“無刷清洗”。超聲波清洗的主要特點是速度快、效果好、容易實現工業控制等針對復雜工件表面,如空穴、凹凸處,普通清洗方法很難實現,而采用超聲波就可以獲得很好的效果。隨著聲化學的出現與應用,再配合使用適當的溶液,調節清洗液酸堿度等,清洗效果更好。
2.1 超聲波清洗的原理和特點
超聲波清洗的換能器將超聲頻電能轉換成機械振動并通過清洗槽壁向盛在槽中的清洗液輻射超聲波。存在于液體中的微氣泡(稱為空化核)在聲波的作用下振動,當聲壓或聲強達到一定值時,氣泡迅速增長,然后突然閉合。在氣泡閉合時,產生沖擊波,在氣泡周圍產生很大的壓力及局部高溫,這種物理現象稱為超聲空化。空化所產生的巨大壓力能破壞不溶性污物而使它們分散于溶液中。蒸汽型空化對污垢層的直接反復沖擊,一方面破壞污物與清洗件表面的吸附,另一方面也會引起污物層的疲勞破壞而脫離。氣體型氣泡的振動對固體表面進行擦洗,污層一旦有縫可鉆,氣泡還能“鉆入”裂縫作振動,使污垢脫落。由于空化作用,兩種液體在界面迅速分散而乳化,當固體粒子被油污裹著而附在清洗件表面時,油被乳化,固體粒子自行脫落。超聲在清洗液中傳播時會產生正負交變的聲壓,沖擊清洗件,同時由于非線性效應會產生聲流和微聲流,而超聲空化在固體和液體界面上會產生高速的微聲流,所有這些作用能夠破壞污物,除去或削弱邊界污層,增加攪拌、擴散作用,加速可溶性污物的溶解,強化化學清洗劑的清洗作用。
由此可見,凡是液體能浸到聲場存在的地方都有清洗作用,而且清洗速度快、質量高,特別適合于清洗件表面形狀復雜,如空穴、狹縫等的細致清洗,易于實現清洗自動化。對一般的除油、防銹、磷化等工藝過程,在超聲波作用下只需兩三分鐘即可完成,其速度比傳統方法可提高幾倍到幾十倍,清潔度也達到高標準。在某些場合下可以用水劑代替有機溶劑進行清洗,或降低酸堿的濃度。對于一些有損人體健康的清洗,如清洗放射性污物可以實現遙控和自動化清洗。超聲清洗也有其局限性,例如對聲波反射強的材料如金屬、陶瓷和玻璃等清洗效果好,而對聲波吸收大的材料如布料、橡膠以及粘度大的污物清洗效果差。#p#分頁標題#e#
2.2 超聲波清洗機的結構和參數設定
(1) 超聲波清洗機結構設計
超聲波清洗機主要由超聲波發生器、超聲換能器和清洗槽組成。超聲波發生器將50Hz的交流電轉換成超聲頻電振蕩信號后,通過電纜輸送給超聲換能器。清洗槽是盛放清洗液和被清洗零部件的容器。
(2) 參數設定
為了實現超聲波清洗的高效率,應當選擇**佳的聲強、頻率及清洗槽聲場分布等參數。工作頻率選在20—50kHz之間。低頻聲波的空化氣泡大、數量少,易于清洗較粗糙物品。高頻聲波空化氣泡小、數量多,易于清洗精細且形狀復雜的物品。本超聲波清洗機用于清洗較粗糙的生活用具,所以采用低頻20kHz。清洗液采用碳氫清洗液,碳氫清洗液具有以下特點:清洗性能好,蒸發損失小,無毒,材料相容性好,不破壞環境,價格便宜。
3 系統的硬件設計
按照設計要求,超聲波清洗機系統的硬件電路主要包括超聲波發射電路,超聲波接收電路,換能電路和鍵盤控制電路等,各模塊有它特定的功能,這些電路性能的好壞直接影響系統的穩定性。
3.1 單片機外圍電路設計
3.1.1 單片機設計方案比較
單片機的選擇有多種方案可供參考,例如AVR單片機、TI公司單片機、STC單片機、PIC單片機和51系列單片機。
因此我在在單片機外圍電路設計前對各種單片機方案進行了比較
[9]:
(1) AVR單片機
AVR單片機由ATMEL公司挪威設計中心的A先生與V先生利用ATMEL公司的Flash新技術, 共同研發出RISC精簡指令集的高速8位單片機。其特點是:簡單易學,AVR程序寫入是直接在電路板上進行程序修改、燒錄等操作,這樣便于產品升級;費用低廉,高速,低耗,I/O口功能強,具有A/D轉換等電路,有功能強大的定時器/計數器及通訊接口。
(2) TI公司單片機
德州儀器提供了TMS370和MSP430兩大系列通用單片機。TMS370系列單片機是8位CMOS單片機,具有多種存儲模式、多種外圍接口模式,適用于復雜的實時控制場合;MSP430系列單片機是一種超低功耗、功能集成度較高的16位低功耗單片機,特別適用于要求功耗低的場合。
(3) STC單片機
STC公司的單片機主要是基于8051內核,是新一代增強型單片機,指令代碼完全兼容傳統8051,速度快8~12倍,帶ADC,4路PWM,雙串口,有全球**ID號,加密性好,抗干擾能力強。
(4) PIC單片機
是MICROCHIP公司的產品,其突出的特點是體積小,功耗低,精簡指令集,抗干擾性好,可靠性高,有較強的模擬接口,代碼保密性好,大部分芯片有其兼容的FLASH程序存儲器的芯片。
(5) 51系列單片機
51些列單片機是在一塊芯片中集成了CPU、RAM、ROM、定時器/計數器和多功能I/O等一臺計算機所需要的基本功能部件。掌握起來比較簡單,且成本低,可靠性高。
綜上所述,選擇51系列的單片機是**符合實際需求的,實驗方便,且數據處理量不是很大,所以,本次設計選定以51系列單片機為控制核心的STC89C52單片機來進行。
3.1.2 STC89C52單片機的特點
STC89C52是51系列單片機的一個型號,它是STC公司生產的。
STC89C52是一個低電壓,高性能CMOS 8位單片機,片內含8k bytes的可反復擦寫的Flash只讀程序存儲器和256 bytes的隨機存取數據存儲器(RAM),器件采用STC公司的高密度、非易失性存儲技術生產,兼容標準MCS-51指令系統,片內置通用8位中央處理器和Flash存儲單元,功能強大的STC89C52單片機可為您提供許多較復雜系統控制應用場合
[1]。
STC89C52有40個引腳,32個外部雙向輸入/輸出(I/O)端口,同時內含2個外中斷口,3個16位可編程定時計數器,2個全雙工串行通信口,2個讀寫口線,STC89C52可以按照常規方法進行編程。其將通用的微處理器和Flash存儲器結合在一起,特別是可反復擦寫的Flash存儲器可有效地降低開發成本。
主要功能特性:
(1) 兼容MCS51指令系統8k可反復擦寫(>1000次)Flash ROM
(2) 32個雙向I/O口,256x8bit內部RAM
(3) 3個16位可編程定時/計數器中斷,時鐘頻率0-24MHz
(4) 2個串行中斷,可編程UART串行通道
(5) 2個外部中斷源,共8個中斷源
(6) 2個讀寫中斷口線,3級加密位
(7) 低功耗空閑和掉電模式,軟件設置睡眠和喚醒功能
STC89C52各引腳功能及管腳電壓如圖3.1所示
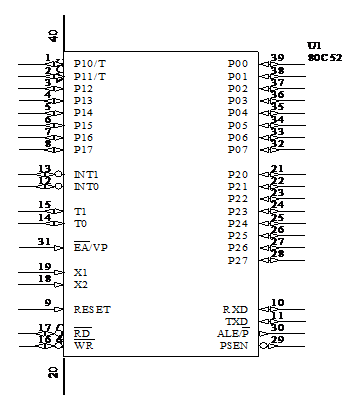 圖3.1 STC89C52引腳圖
圖3.1 STC89C52引腳圖
概述:STC89C52為40 腳雙列直插封裝8位通用微處理器,采用工業標準的C51內核,在內部功能及管腳排布上與通用的8xc52 相同,其主要用于會聚調整時的功能控制。功能包括對會聚主IC 內部寄存器、數據RAM及外部接口等功能部件的初始化,會聚調整控制,會聚測試圖控制,紅外遙控信號IR的接收解碼及與主板CPU通信等。主要管腳有:XTAL1(19 腳)和XTAL2(18 腳)為振蕩器輸入輸出端口,外接12MHz 晶振。RST/Vpd(9 腳)為復位輸入端口,外接電阻電容組成的復位電路。VCC(40 腳)和VSS(20 腳)為供電端口,分別接+5V電源的正負端。P0~P3 為可編程通用I/O 腳,其功能用途由軟件定義,在本設計中,P0 端口(32~39 腳)被定義為N1 功能控制端口,分別與N1的相應功能管腳相連接,13 腳定義為IR輸入端,10 腳和11腳定義為I2C總線控制端口,分別連接N1的SDAS(18腳)和SCLS(19腳)端口,12 腳、27 腳及28 腳定義為握手信號功能端口,連接主板CPU 的相應功能端,用于當前制式的檢測及會聚調整狀態進入的控制功能#p#分頁標題#e#
[2]。
P0 口:P0 口是一組8 位漏極開路型雙向I/O 口, 也即地址/數據總線復用口。作為輸出口用時,每位能吸收電流的方式驅動8 個TTL邏輯門電路,對端口P0 寫“1”時,可作為高阻抗輸入端用。
在訪問外部數據存儲器或程序存儲器時,這組口線分時轉換地址(低8 位)和數據總線復用,在訪問期間激活內部上拉電阻。
在Flash 編程時,P0 口接收指令字節,而在程序校驗時,輸出指令字節,校驗時,要求外接上拉電阻。
P1 口:P1 是一個帶內部上拉電阻的8 位雙向I/O 口, P1 的輸出緩沖級可驅動(吸收或輸出電流)4 個TTL 邏輯門電路。對端口寫“1”,通過內部的上拉電阻把端口拉到高電平,此時可作輸入口。作輸入口使用時,因為內部存在上拉電阻,某個引腳被外部信號拉低時會輸出一個電流(IIL)。
P2 口:P2 是一個帶有內部上拉電阻的8 位雙向I/O 口,P2 的輸出緩沖級可驅動(吸收或輸出電流)4 個TTL 邏輯門電路。對端口P2 寫“1”,通過內部的上拉電阻把端口拉到高電平,此時可作輸入口,作輸入口使用時,因為內部存在上拉電阻,某個引腳被外部信號拉低時會輸出一個電流(IIL)。
P3 口:P3 口是一組帶有內部上拉電阻的8 位雙向I/O 口。P3 口輸出緩沖級可驅動(吸收或輸出電流)4 個TTL 邏輯門電路。對P3 口寫入“1”時,它們被內部上拉電阻拉高并可作為輸入端口。此時,被外部拉低的P3 口將用上拉電阻輸出電流(IIL)。
RST:復位輸入。當振蕩器工作時,RST引腳出現兩個機器周期以上高電平將使單片機復位
[4]。
XTAL1:振蕩器反相放大器的及內部時鐘發生器的輸入端。
XTAL2:振蕩器反相放大器的輸出端。
特殊功能寄存器:在STC89C52 片內存儲器中,80H-FFH 共128 個單元為特殊功能寄存器(SFE)。
數據存儲器: STC89C52 有256 個字節的內部RAM,80H-FFH 高128 個字節與特殊功能寄存器(SFR)地址是重疊的,也就是高128 字節的RAM 和特殊功能寄存器的地址是相同的,但物理上它們是分開的。
波特率發生器:當T2CON中的TCLK 和RCLK 置位時,定時/計數器2 作為波特率發生器使用。如果定時/計數器2 作為發送器或接收器,其發送和接收的波特率可以是不同的,定時器1 用于其它功能,其引腳與第二功能如下。
表3.1 STC89C52P3口的第二功能
|
引腳 |
第2功能 |
|
P3.0 |
RXD(串行口輸入端) |
|
P3.1 |
TXD(串行口輸出端) |
|
P3.2 |
INT0(外部中斷0請求輸入端,低電平有效) |
|
P3.3 |
INT1(外部中斷1請求輸入端,低電平有效) |
|
P3.4 |
T0(定時器/記時器0計數脈沖輸入端) |
|
P3.5 |
T1(定時器/記時器1計數脈沖輸入端) |
|
P3.6 |
WR(外部數據存儲器寫選通信號輸出端,低電平有效) |
|
P3.7 |
RD(外部數據存儲器讀選通信號輸出端,低電平有效) |
STC89C52 的程序存儲器陣列是采用字節寫入方式編程的,每次寫入一個字節,要對整個芯片內的PEROM 程序存儲器寫入一個非空字節,必須使用片擦除的方式將整個存儲器的內容清除。
3.1.3顯示與鍵盤電路的設計
顯示器是一個典型的輸出設備,而且其應用是極為廣泛的,幾乎所有的電子產品都要使用顯示器,其差別僅在于顯示器的結構類型不同而已。**簡單**直觀的顯示器可以使用LED發光二極管,而復雜的比較完整的顯示器應該是CRT監視器或者屏幕較大的LCD液晶屏。
LCD技術是把液晶灌入兩個列有細槽的平面之間。這兩個平面上的槽互相垂直(相交成90度)。也就是說,若一個平面上的分子南北向排列,則另一平面上的分子東西向排列,而位于兩個平面之間的分子被強迫進入一種90度扭轉的狀態。由于光線順著分子的排列方向傳播,所以光線經過液晶時也被扭轉90度。但當液晶上加一個電壓時,分子便會重新垂直排列,使光線能直射出去,而不發生任何扭轉。
LCD是依賴極化濾光器(片)和光線本身。自然光線是朝四面八方隨機發散的。極化濾光器實際是一系列越來越細的平行線。這些線形成一張網,阻斷不與這些線平行的所有光線。極化濾光器的線正好與**個垂直,所以能完全阻斷那些已經極化的光線。只有兩個濾光器的線完全平行,或者光線本身已扭轉到與第二個極化濾光器相匹配,光線才得以穿透。
LCD正是由這樣兩個相互垂直的極化濾光器構成,所以在正常情況下應該阻斷所有試圖穿透的光線。但是,由于兩個濾光器之間充滿了扭曲液晶,所以在光線穿出**個濾光器后,會被液晶分子扭轉90度,**后從第二個濾光器中穿出。另一方面,若為液晶加一個電壓,分子又會重新排列并完全平行,使光線不再扭轉,所以正好被第二個濾光器擋住。總之,加電將光線阻斷,不加電則使光線射出。#p#分頁標題#e#
顯示電路如圖3.2所示。
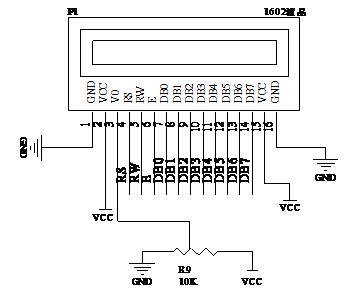 圖3.2 LCD顯示電路連接圖
圖3.2 LCD顯示電路連接圖
在外圍的鍵盤控制電路中,設置了四個獨立按鍵,分別與單片機的P3.4~P3.7相連,當按下S1時,啟動超聲波發射,開始機器;當按下S2時,停止發射超聲波,即停止機器;S3為報警開關,當清洗過快時,蜂鳴器電路發出警告,此時按下S3鍵,即可停止報警,S4為預留出來的按鍵,當需要的時候可以實行編程控制。電路設計如圖3.3所示。
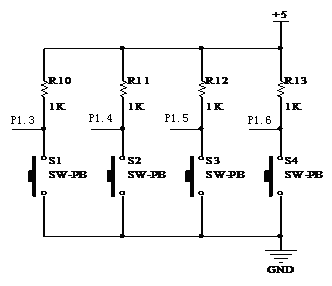 圖3.3 鍵盤控制電路
圖3.3 鍵盤控制電路
3.2 超聲波發生器的選擇
超聲波發生器也稱作超聲電源,它是一種用以產生超聲頻電能并向超聲換能器提供的裝置。按照所采用的工作原理,可以把超聲波發生器分為模擬電路和數字電路兩大類。模擬電路超聲波發生器又分為振蕩一放大型和逆變型兩種。本設計采用振蕩一放大型超聲波發生器,其結構框圖如圖3.4所示。它是一個帶有振蕩電路的放大器,由振蕩、放大、匹配電路和電源組成。振蕩器產生一定頻率的信號,放大器將其放大到一定的功率輸出。達到**佳負載值,通過輸出變壓器進行阻抗匹配,并通過功放輸出。
振蕩條件:
從結構上看,正弦波振蕩器就是一個沒有輸入信號的、帶選頻網絡的正反饋放大器。表示接正反饋時放大器在輸入信號顯示時的輸出。可知,如果在放大器輸入端1外接一定頻率,一定幅度的正弦波信號Xa,經過基本放大器和反饋網絡所構成的環路輸出后,在反饋網絡的輸出端2得到反饋信號Xf與Xa在大小和相位上都一致,則可以除去外接信號Xa,將1、2兩端連接在一起(如圖中虛線所示)而形成閉環系統,其輸出端可繼續維持與開環時一樣的輸入信號。
和
n=0,1,2,3…… 相位平衡條件 (3.1)
這是正弦波振蕩器產生持續振蕩的必要條件。振蕩器的振蕩頻率是由相位平衡條件決定的。一個正弦波振蕩器只在某一個頻率下滿足相位平衡條件,這個頻率就是f0,這就是要求在

環路中包含一個具有選頻特性的網絡。它可以設置在放大器A中,也可以設置在反饋網絡F中,它可以用R、C元件組成,也可以用L、C元件組成。欲使振蕩器能自行建立振蕩,就必須滿足

>1的條件。這樣在接通電源后,振蕩器就可以自行起振,**后趨于穩態平衡。
3.3 超聲波振蕩器設計
由于TL494價格便宜而且性能優越,設計采用由開關穩壓塊TL494構成的振蕩器。
將TL494的5腳(CT)和6腳(RT)接定時元件電阻R和電容C,即可起振。如圖3.4所示。
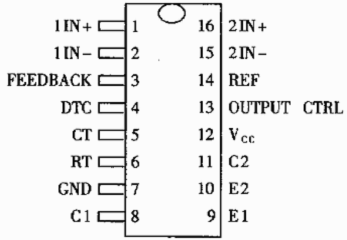
圖3.4 TL494的引腳圖
由于頻率選為20kHz由上公式得RC=0.5958×

,振蕩器輸出方波的占空比是換能器產生的超聲波強度的決定因素。通過給TL494的4腳加以一定的直流電壓就可實現占空比調整。定時元件由電容C、電阻R1和電位器R2構成,調節電位器R2即可實現頻率的調整。本機供電電源為12V,采用的是推挽工作方式。電阻R3(10kΩ)和電位器R4(10kΩ)構成分壓電路,死區時間控制端的電位應界于2.5~5V之間。調節電位器R4亦可實現超聲波的強度調節。
(1)超聲波放大器的選擇
超聲波放大器的作用是將振蕩信號放大**所需電平。放大部分可以是單級的,也可以是多級的,主要看輸出功率的需要。早期的超聲波發生器使用電子管做放大器件,現在則普遍采用晶體管(三極管、場效應管和IBGT器件)。近年來越來越多的廠家采用功率集成電路做超聲波發生器的放大器件。目前工業上廣泛使用的超聲波發生器基本上被晶體管電路壟斷。
與電子管發生器相比,晶體管發生器的優點在于體積小、重量輕、效率高。但從另一方面講由于受到方向擊穿電壓、**大集電極電流、**大集電極耗散功率參數的限制,通常一對晶體管的**大輸出功率只能達到百瓦級。要提高晶體管發生器的輸出能力,除了有賴于搞性能器件外,還必須采用高效率的電路。傳統的甲類、乙類、丙類放大器是把有源器件作為電流源工作。在這些放大器中,晶體管工作在伏安特性曲線的有源區。集電極電流受基極激勵信號控制作相應變化。
(2)低壓驅動電路
本機采用高壓小電流功放電路,由兩只三極管和耦合變壓器構成。為了避免兩只功放管同時導通,導致內部功耗增加,兩管的導通時間必須錯開,使它們在交替工作時有一段同時截止的時間。為此,三極管P1和P2對振蕩器的輸出作反相處理,三極管選用PNP型的8550。低壓驅動電路所用的電源是直流12V,而功放電路的電源是交流220V,在三極管后加入一個耦合變壓器,完成高低壓隔離的任務。
(3)功放匹配電路功放電路#p#分頁標題#e#
電路由兩個VMOS功率場效應管2SK791構成。具有線性度高、頻率響應好、開關速度快等優點,是理想的開關元件。但其關斷特性在電流小時并不理想,下降沿有拖尾。
3.4 高頻驅動和匹配電路
超聲發生器與一般放大器的一個重要區別在于它的匹配電路部分。一般放大器與負載之間的匹配只牽涉到阻抗變換,而超聲波發生器與負載之間的匹配則除了阻抗變換之外,還有一項很重要的內容—調諧,即選用一定值的阻抗元件,使之在工作頻率上與負載中的電抗成分諧振。只有在同時進行了阻抗變換和調諧之后,整個系統才算是達到了匹配,換能器才能正常工作.
超聲波清洗機中的匹配電路是將發生器輸出的電能送往換能器的通道。匹配電路雖然結構簡單(通常只有一個匹配電感),卻具有重要作用。相同型號的清洗機,匹配調得好的清洗效果好;匹配調得差的則清洗效果差。對同一臺機器而言,如果工作一段時間后清洗效果變差,或者換能器經過更換,都需要重新調整匹配。與一般電子設備的匹配有所不同,
超聲清洗機的匹配除了要解決變阻問題(即變換負載的阻值,使之與發生器的**佳負載值相等)外,還要解決調諧問題,即用匹配電感的感抗抵消換能器的容抗,使換能器呈純阻性。技術人員通常是根據各自的經驗進行匹配。例如,有人在改變清洗槽水位時觀察電流的變化,如果電流變化處于一定范圍之內,同時管子不發熱,空化聲強,便認為匹配已調好。也有人讓機器空載時稍,微呈電感性,而在加載后轉變為純阻狀態。這些經驗都是適用的。但在已有經驗的基礎上,再掌握匹配的原理,就可以在匹配時有的放矢,更加主動,從而收到事半功倍的效果。其驅動電路如圖3.5所示。
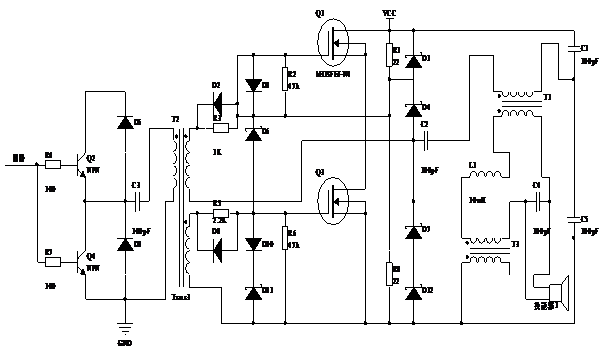
圖3.5 清洗機的高頻驅動電路
3.5 超聲波換能器設計
用于超聲清洗的換能器有兩種類型.一是磁致伸縮換能器,另一種是壓電換能器,磁致伸縮換能器這種換能器的電聲效率比較低.而且金屬鎳材料價格昂貴,制造工藝復雜,所以目前很少采用。還有一種用鐵氧體材料做成的磁斂伸縮換能器,雖然其電聲效率比較高,但機械強度低,所能承受的電功率容量小,因而目前我G也很少應用目前我G主要采用壓電換能器,因為這種換能器的電聲轉換效率高,原材料價格便宜,而且便于制造不同的結構,以適應不同的清洗要求。壓電換能器又有很多種如圓柱形、喇叭形等。經過對比**后確定選用喇叭形夾心壓電換能器作為此次的換能器。
換能器是用來進行能量轉換的器件,是將一種形式的能量轉換為另一種形式的能量的裝置。在聲學研究*域中,換能器主要是指電聲換能器,它能實現電能和聲能之間的轉換。
超聲波換能器一般有磁致伸縮換能器和壓電晶體換能器兩類。屬于磁致伸縮的有鎳片換能器和鐵氧體換能器。鐵氧體換能器的電聲轉換效率比較低。一般使用一、二年后效率下降,甚**幾乎喪失電聲轉換能力。鎳片換能器的工藝復雜,價格昂貴所以**今很少使用。目前,廣泛使用壓電晶體換能器。這種換能器電聲轉換效率高,原材料價格便宜,制作方便,也不容易老化。常用的材料有石英晶體、鈦酸鋇(BaTiO3)和鋯鈦酸鉛(PbTiZrO3,簡稱PZT)。石英晶體的伸縮量太小,3000V電壓才產生0.01μ m 以下的變形。鈦酸鋇的壓電效應比石英晶體大20~30 倍,但效率和機械強度不如石英晶體。鋯鈦酸鉛具有二者的優點,一般可用作超聲波清洗,探傷和小功率超聲波加工的換能器。
3.6 清洗槽的設計
清洗槽由內槽和外殼組成.內槽的外表面(一般在槽底外表)粘結超聲換能器,槽內盛清洗液。槽一般用耐腐蝕的不銹鋼板制成,過于厚會影響聲的輻射.槽的內壁,尤其是粘有換能器的輻射板要平整拋光,不能有傷痕,否則易產生空化腐蝕,縮短使用壽命.為避免被清洗工件直接與槽壁板接觸而劃傷,一般用鏤空吊籃(網籃)或支架將清洗件懸吊在清洗液中.網籃的骨架應盡可能地小而輕,一般用不銹鋼絲編成或用其它反射
性能良好的材料做成.結構上要使超聲波受阻小而清洗液易于流動.內槽的尺寸要根據清洗件的大小和形狀而定.清洗件的總表面積不應大于內槽的體積.粘有換能器的輻射板(如槽底板)所承受的電功率強度一般低于1.5 W/cm
2(用壓電換能器時.大多數應在0.5~1 w/cm
2之間).過高的強度會加速輻射板表面的空化腐蝕,同時由于過劇烈的空化所產生的氣泡會影響能量傳遞,使遠離輻射面的液體空間聲強變弱而達不到均勻清洗的目的.在普通的清洗槽中,由于液面的反射,在清洗槽中會產生的駐波,使得在液體空間有些區域聲壓**小(波節處),有些地方聲壓**大(波腹處)而造成清洗干凈程度不均勻.為減少駐波的形成,有時清洗槽的形狀要特別設計,或采取其他措施,例如掃頻工作方式.清洗件在槽中的排列要有一定的間隔,而**窄小的面應朝向換能器的輻射面,以免妨礙聲輻射到整個清洗槽空間。內槽尺寸為400×360×200mm,超聲波功率為500W;外槽尺寸為420×490×380mm;超聲波發生器電路箱為224×100×135mm,由六個直徑為4.5毫米的螺紋固定。其結構如圖3.6所示#p#分頁標題#e#
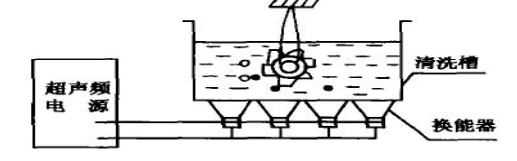 圖3.6 清洗槽結構
4 綜合調試
圖3.6 清洗槽結構
4 綜合調試
4.1 軟件調試
系統軟件設計采用模塊化設計,主要包括中斷主程序、入口程序、定時器0中斷程序、倒計時顯示子程序、超聲波發射子程序、延時子程序和報警子程序設計等。
(1)主程序流程圖
主程序shou先要對系統環境初始化,設置定時器T0工作模式為16位定時/計數器模式,置位總中斷允許位EA并清計數器,然后調用超聲波發生子程序送出一個超聲波脈沖。
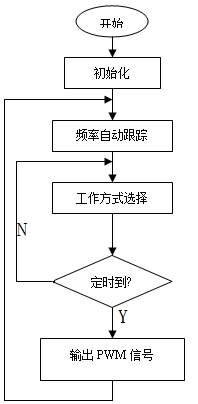 圖4.1 程序主流程圖
圖4.1 程序主流程圖
為了避免超聲波發射器引起的直射波,需要延時0.1ms后才可打開外部中斷0的超聲波信號。由于采用的是12MHz的晶振,計數器每計一個數就是0.5μs,所以當主程序檢測到標志位后,調用振動子程序**后顯示在LED上,主程序流程圖如圖4.1所示。
(2) 中斷子程序及流程圖
當超聲波發送脈沖波后,在程序中定義為外部中斷0,INT0中斷在程序中的作用是形成中斷進行跳轉進入中斷子程序,能夠實現在程序設計上的思維,使整個程序符合邏輯設計。中斷子程序流程圖如圖4.2所示。在程序中應注意進中斷時變量的保存及出中斷時變量的恢復。當有外部中斷時,為避免進入中斷死循環,必須在退出中斷子程序時用軟件清除該標志位。系統在進入中斷時會自動關中斷,之后進入處理子程序。接收中斷后,讀取定時器值,設置標志位。
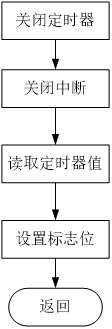
圖4.2 中斷子流程圖
(3) 按鍵掃描程序流程圖
按鍵掃描程序流程圖如圖4.3所示,該程序部分完成對按鍵的掃描,組合鍵碼值返回,由于按鍵的公共端接低電平,所以當按鍵I/O口為低電平時,證明有按鍵按下,所以進入程序后先將P1口即按鍵的接口,全部置1,然后通過if((P1&0xff)!=0xff);來判斷是夠有按鍵動作,將P1口與0XFF,如果值不等于0XFF,則證明有按鍵動作,然后經過20ms的延時,再次使用該語句進行一次判斷,如果確實有按鍵按下,則此語句成立,將進入鍵碼值提取提取,加入按鍵1按下則編碼值為01111111,為0X7F,為了便于觀察與調試將該鍵碼值取反,則為0X80,將該按鍵編碼返回,然后執行查詢程序進行按鍵的查詢,查詢后進行按鍵執行程序的執行。
圖4.3 按鍵掃描流程圖
4.2 硬件調試
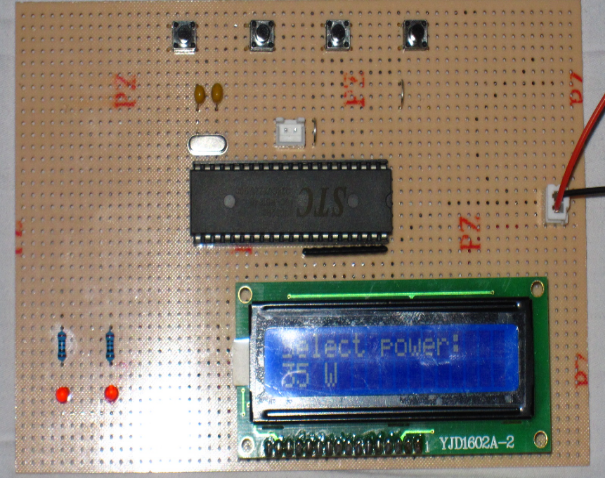
本系統主要根據顯示設置,來判斷清洗的功率及倒計時的設定,來進行相應的清洗操作。其按鍵操作如下:上排四個按鍵由左**右依次為設置鍵、確認鍵、加操作鍵、減操作鍵。

圖4.4 上電顯示圖
剛開始上電操作如圖4.4:
當將輸入端分別連接直流5V電源正負兩端時,系統便會自動啟動,1602顯示器會顯示“welcome please set up”,就可以開始設置清洗功率及倒計時時間了。

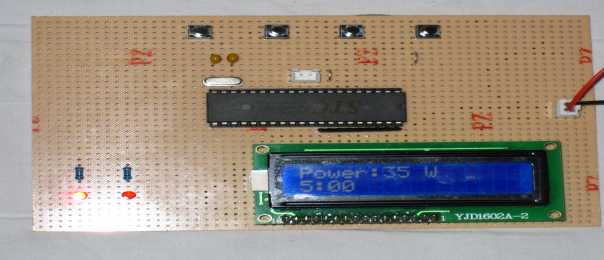
圖4.5 35w檔位初始化

如圖4.5所示為35W檔位,及定時5分鐘后開始清洗。這是默認的程序設置檔位,在系統自動初始化結束之后便會出現該窗口顯示,如選擇默認設置程序,可點擊確認鍵直接開始工作。
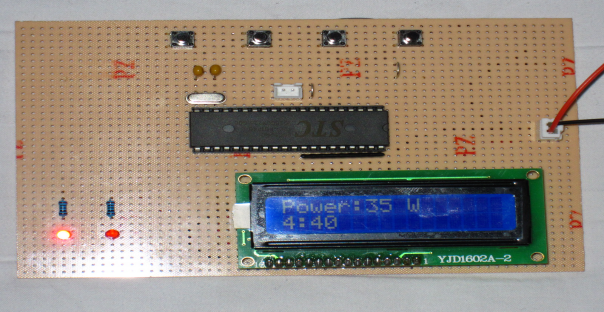
圖4.6 35w檔位開始倒計時
如圖4.6所示,選擇默認設置后,計時器會間隔10s倒計時,5分鐘結束后系統自動停止工作,左側35W功率指示燈發光顯示系統開始工作。
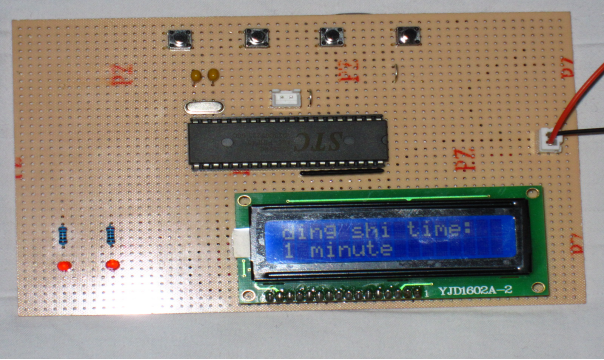

圖4.7 倒計時時間設置
如圖4.7如需調整設置,按下確認鍵,系統停止工作,然后點擊設置鍵,會出現時間設置菜單,有1分鐘、1.5分鐘、5分鐘、10分鐘四種選擇,按照所需時間,點擊相應加減操作鍵進行設定。
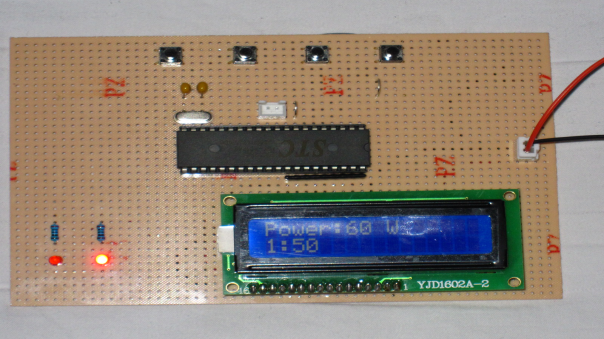

圖4.8 功率設置
當進行完倒計時設置后,點擊確認按鍵,繼續設置功率檔位,該檔位有35W和60W兩種選擇,點擊相應加減操作鍵進行選擇,選擇完畢后點擊確認鍵,確認無誤后在次點擊確認鍵,倒計時功能啟動,左側60W功率指示燈發光顯示系統正在工作。
結 論
通過幾個月的努力,在老師的悉心指導下,通過自己的努力,終于完成了基于單片機的超聲波清洗機的設計。
畢業設計是本科學習階段一次非常難得的理論與實際相結合的機會。通過這次對基于單片機的超聲波清洗機的設計,我擺脫了單純的理論知識學習狀態,設計的實踐鍛煉了我的綜合運用所學的專業基礎知識,解決實際工程問題的能力,同時也提高了我綜合運用文獻資料、設計手冊、設計規范以及電腦制圖等其他專業能力水平。#p#分頁標題#e#
該設計的硬件結構簡單,集成度高,工作可靠,測試穩定,顯示準確清晰,使人一目了然。經過測試,各部分運行正常,成功地達到了硬件設計要求。
通過與硬件電路的結合,對程序的測試與調試,**終是程序能夠正常運行,實現了運用
超聲波清洗器件的功能。
總之,整個系統的工作狀態良好,完成了設計任務的全部要求。
在這次的設計后我了解到,非接觸測量在當今的社會發展當中已經變得十分重要,而超聲波作為非接觸測量的一種方法,已經在很多*域得到應用。本設計已經成功完成,但仍然存在著很大的改進空間。
致 謝
在論文完成之際,我shou先要向我的導師表示**真摯的謝意。論文寫作期間,給了我很多幫助和指導,使我得以順利完成論文。
在這幾個月畢業設計的學習和工作中,遇到了很多困難,導師的精心指導和培養使我在各個方面都受益非淺,在分析問題、解決問題及獨立工作的能力有了很大的提高。在此期間,老師提出了很多有益的建議并給予我很大幫助。在本文的課題研究及寫作過程中,也給予了大力支持。在此謹向老師表示衷心的感謝。
在這個學習氛圍活躍、團結友愛的集體里,大家互相幫助,彼此討論問題,共同提高。在此也要感謝我的各位學友,有了大家的支持和幫助使得論文研究工作得以順利的進行。
**后,再次向老師以及幫助過我的同學們表示**真誠的謝意。
參考文獻
[1] 曹風G. 超聲加工技術[M].化學工業出版社,2005
[2] 張海燕.超聲波清洗技術[J].近代物理知識,2002
[3] 白基成 郭永豐. 特種加工技術[M].哈爾濱工業大學出版社,2006
[4] 胡傳忻 夏志東. 特種加工手冊[M].北京工業大學出版社,2007
[5] 康華光. 電子技術基礎[M].高等教育出版社,1987
[6] 艾小洋.中G工業清洗*域的現狀與發展趨勢[M].現代制造,2004
[7] 欒桂冬 張金鐸. **仁乾.壓電換能器和換能器陣[M].修訂版;北京大學出版社,2005 .
[8 ] 邢增平. Protel99SE設計**指導. 中G鐵道出版社,2004.
[9 ] 李麗霞. 單片機在超聲波測距中的應用. 電子技術,2002.
[10] 劉鳳然. 基于單片機的超聲波測距系統[J]. 傳感器世界,2001年05期.
[11]STC Corporation Datasheet. ULN2003A DARLINGTON TRANSISTOR ARRAY[S],2001
[12] Philips Semiconductors Datasheet. Low powerful dual voltage comparator LM393[S],2001
附錄A 英文原文
This design with the 40MHz system clock as a micro-step process clock, according to the clock beat the establishment of various control logic. The design of the micro-program is through "painting wave" method to compile out. Since the control memory is stored in the logic control signals, while the control signal is a high-low sequence (of course also includes information on rising and falling edges), so the use of control waveforms to represent the control logic is the most intuitive way of using the waveform Draw the control logic of the most easy to understand, the most easy to maintain. The establishment and maintenance of micro-program in a text file to, and use dotted lines on behalf of designated high, with low solid line represents the next draw.
This method is mainly used for the preparation of measurement and control when the data is temporarily stored, a smaller memory space for storing the data in terms of that if several sets of data collected averaged as the sampling results may be avoided due to interference in the acquisition undermined the authenticity of the data; if stored in the random data from memory loss due to interference or data changes, you can set the memory area in the random inspection signs; in order to reduce interference on the destruction of random memory area can be random access memory chip write signal line increases triggering device only when the CPU write data only hair. Software, there are many anti-jamming measures, such as digital filtering program, anti-narrow pulse delay procedures, the logic state of the authenticity of the judge and so on. Sometimes, you must use a combination of software and hardware approach to suppress interference, commonly used approach is to set a timer to protect the program to work correctly.
In recent years, electronic instruments toward "light, thin, short and small" and the multi-functional, high performance and low cost direction. Plastic box, plastic parts or panels are widely used in electronic devices, the result of electromagnetic waves pass easily through the outside shell or panel of the instrument harmful interference with normal work, while the instrument produced by electromagnetic waves, but also very easy to radiation into the surrounding space affecting the normal operation of other electronic devices. In order to make such electronic equipment to meet the electromagnetic compatibility requirements, it is in practice, the developed process plastic metal processing methods, such as zinc sputtering, vacuum plating (AL), electroplating or chemical copper plating, paste, metal foil ( Cu or AL) and coated with conductive coatings. Absorption, transmission and attenuation characteristics of electromagnetic waves, electromagnetic interference shielding and thus play a role. Practical applications, the use of conductive paint for shielding coatings will act excellent performance and reasonable prices. Shielding where needed, made of a closed conductive shell and grounding into two different kinds of electromagnetic waves inside and outside separated. Practice has shown that, if the shielding material can reach (30 ~ 40) dB or more attenuation of the shielding effect, is a practical and feasible.#p#分頁標題#e#
As electronic technology, widely used, and various kinds of interference radiation devices are complex, to the complete elimination of electromagnetic interference is impossible. However, under the principle of electromagnetic compatibility, you can take a number of technical measures to reduce the electromagnetic interference, so that electromagnetic interference control to a certain range, thus ensuring the compatibility of systems or equipment, for example, communication systems were originally designed, it should be a rigorous on-site radio testing, targeted to select the frequency and polarization, to avoid radar, mobile communications clutter interference; high-voltage select a path, we should try to bypass the radio (stations), or take advantage of receiving lots of topography, surface features shield; receiving equipment and industrial interference source equipment is properly configured, so that the receiving device with a variety of industrial sources of interference from a certain distance; in microwave circuit design, in order to reduce the interference, the antenna can be used adjust the high and low points microwave circuit reflection point, and the use of mountain block reflected waves, so they can not interfere with the formation of the direct wave. In addition, the microwave tower is independent of the tall buildings should be used to improve the grounding, shielding measures such as lightning.
Ultrasonic verbiage effect refers to the tiny bubbles with liquid exist under the action of nuclei in ultrasonic, experience the sparse and compression phase ultrasonic, volume growth, shrinkage, renewable rise, again contraction, multiple seasonal shock asunder, and eventually the dynamic process of high speed. This process occurs within the time extreme, the Chinese dress rose sharply, after gas compression in its seasonal shock especially collapse process, can produce transient enormous of high temperature and high pressure air bubble inside, and make the gas and liquid medium of cracking interface. Recent studies show that cavitation reactions occur predominantly in the 100 ~ 1000kHz within the scope of medium frequency, and the high frequency, liquid 1MHz above acoustic wave in the micro jet and bubbles produced a stable, not broken.
Change again, ultrasonic were mainly used in cleaning process and catalytic process, its principle is ultrasonic cavitation occurred when the fluid, can produce high shear forces.
In cleaning applications:
When compressed collapse of bubbles in the high temperature and high pressure produced by reducing the dirt fish shock between washing pieces of adhesion, cause bilge of damage and from; Meanwhile bubble can also "bore into the" gap and cracks in vibration, make dirt fall off, therefore suitable for complicated shape parts cleaning.
The application in catalytic process
Because hot air produce high temperature and high pressure coincided with a strong shock wave and speed will enter the micro jet 400km/h, of liquid - solid not homogeneous catalytic systems have very good impact, its effects include the following aspects: first shockwave and micro jet can continually cleaning divest catalyst of reactant and impurities surface adsorption, strong may be erosion solid surface when; Then cause molecules colliding between strong gather, is catalysis and reflect activity level structure and composition of the significant changes; The third strengthening mass transfer process. Do one, ultrasonic accelerated the process of chemical reactions.
Ultrasonic application in water treatment
Ultrasonic radiation can in liquid produce distinctive physical chemistry, it integrates advanced oxidation, burning and supercritical water oxidation and so on many kinds of water treatment series features and a suit, at the same time with the sterilization effect, cutting operation is simple and easy, degradation speed, can live alone with other technology in water treatment on joint, extremely potential application.
To contain the organic wastewater treatment
Ultrasound technology can be used in the treatment of various hard-degradation waste, at present to monocylic aromatic compounds, pahs, phenols, chlorinated hydrocarbons, chlorinated hydrocarbon, organic acids, the dye, alcohols, ketone and so on many kinds of material research, and achieved good effect.
Drinking water treatment
Our drinking water supply 25% water and reservoir water lake, since 1990s, is increasingly severe eutrophication, water hua occurrence frequency and severity a rapid increase trend. So it is necessary to serious water pollution on the application of the region ultrasonic pretreatment water. Ultrasonic on algae are at level 1 reaction kinetics, has good removal efficiency, high frequency ultrasound can accelerate the speed of response place algae.
Ultrasonic technology than light, heat, chemical methods more directly, can and disinfection disinfectant are used together, to be disinfected, and greatly reduces the disinfectant dosage. As older wave of conventional disinfectant mosquito larvae of chlorine, ozone, hydrogen peroxide solution has a strong resistance, some southern waterworks research found that ultrasonic wave can effectively remove the mosquito larvae wave in waterworks.
In the application of ultrasonic sludge treatment
The influence of sludge dewatering properties
Ultrasonic can significantly improve sludge dewatering properties, flocculation is the important reason of sludge reduction. Ultrasound is the sludge particles retrogradation ofmechanically medium enhancement, simultaneously changed sludge viscous and charged situation, destroy the sludge colloid flocculent body structure, make the sludge viscosity and grain boundary effect is reduced, is the effective collision of sludge particles increases, effectively reduce the sludge, thus improving the water together, is lactobacillus colonisation sludge than resistance is reduced, the sludge dewatering more easily military sludge role.#p#分頁標題#e#
Ultrasonic degradation of organic wastewater, technology of drinking water and sludge, has the extensive applicability, it can be used alone, also can be combined with other water treatment technology use, as long as the right conditions, organic matter can be completely ore into carbon dioxide and inorganic ions. It is a kind of environmental friendly water treatment technology, have good development and application prospect.
Ultrasonic cleaning is a branch of the largest power ultrasound, the mechanism research and equipment development and cleaning process research and application in our country about 50 years of history, is almost and foreign synchronism. Now, with the deepening of reform and opening up the rapid development of national emergency, and scientific and technological progress, ultrasonic cleaning technology research have developed rapidly, there was some new characteristics.
Since always, acoustic cavitation is considered to be the main motivation, ultrasonic cleaning with about 1MHz now found 3MHz even when the high-frequency cleaned, the main mechanism is not cavitation, but high frequency pressure wave flushing effect. At this time due to too frequently, it is difficult to happen sound in a waffle, cleaning the cleaning principle generally think mainly due to the pressure gradient, particle velocity and acoustic flow role.
Acoustic cavitation single bubble theory with the comparatively solid foundation, but now found in many practical system, empty bubble cannot be displayed by single bubble theory establishment of a single entity model, the whole cavitation bubble number affecting cavitation effect and sound field. So have put forward the concept of cavitation structure, place cavitation bubble were force. Cavitation structure is some same size, speed and oneself also is in shock of the cavitation bubble of non-uniform concentration by the formation of the structure.
More research ultrasonic some kei avoid magnetic temperature is the effect of ultrasound clean quality
One of the most important factors, while cavitation bubble closed produces local high temperature and high pressure cleaning, like the temperature rising, temperature, cavitation causes cavitation nuclear increase advantageous, cleaning effect is poor.
Ultrasonic cleaning, cleaning is indispensable, cleaning effect, quality and detergent has the very big relations. In certain concentration range, ultrasonic irradiation can cause fluid surface tension is reduced, although its influence and sample solution and its physical and chemical properties of the concentration of relevant, but its surface tension in a concentration separately reduce to a minimum.
Ultrasonic cleaning process will produce cavitation noise, long-term in this working environment of personnel, may cause health declined, work ability reduce etc.
Ultrasonic anti-scaling aspects though in some development, but also not into the perfect, and is developing fast, theory application development lags behind. By ultrasonic and chemical reagents such as combining the sound development of chemical antiscale and its theory needs further development, in order to guide the application. And how to influence put a dog effect a factor of research, etc.
附錄B 譯 文
本設計用40MHz的系統時鐘作為微程序的步進時鐘,按時鐘節拍進行各控制邏輯的編制。本設計的微程序是通過“畫波形”的方法編制出來的。既然控制存儲器中存儲的是控制信號的邏輯,而控制信號是高低電平的序列(當然也包括上升沿和下降沿的信息),所以使用控制波形來表示控制邏輯是**直觀的方法,使用波形畫出的控制邏輯**容易理解,**容易維護。微程序的編制與維護在一個文本文件中進行,用上劃虛線代表高電平,用下劃實線代表低電平。
這種方法編制主要用于測量和控制時數據的暫時存放,內存空間較小,對存放的數據而言,若將采集到的幾組數據求平均值作為采樣結果,可避免在采集時因干擾而破壞了數據的真實性;如果存放在隨機內存中的數據因干擾而丟失或者數據發生變化,可以在隨機內存區設置檢驗標志;為了減少干擾對隨機內存區的破壞,可在隨機存儲器芯片的寫信號線上加觸發裝置,只有在CPU寫數據時才發。軟件抗干擾的措施也很多,如數字濾波程序、抗窄脈沖的延時程序、邏輯狀態的真偽判別等。有時候,必須采用軟件和硬件相結合的辦法才能抑制干擾,常用的辦法是設置一個定時器,從而保護程序正常運行。
近年來,電子儀器向著“輕、薄、短、小”和多功能、高性能及成本低方向發展。塑料機箱、塑料部件或面板廣泛地應用于電子儀器上,于是外界電磁波很容易穿透外殼或面板,對儀器的正常工作產生有害的干擾,而儀器所產生的電磁波,也非常容易輻射到周圍空間,影響其它電子儀器的正常工作。為了使這種電子儀器能滿足電磁兼容性要求,人們在實踐中,研究出塑料金屬化處理的工藝方法,如濺射鍍鋅、真空鍍(AL)、電鍍或化學鍍銅、粘貼金屬箔(Cu或AL)和涂覆導電涂料等。經過金屬化處理之后,使完全jue緣的塑料表面或塑料本身(導電塑料)具有金屬那樣反射(如手機)。吸收、傳導和衰減電磁波的特性,從而起到屏蔽電磁波干擾的作用。實際應用中,采用導電涂料作屏蔽涂層,性能優良而且價格適宜。在需要屏蔽的地方,做成一個封閉的導電殼體并接地,把內外兩種不同的電磁波隔離開。實踐表明,若屏蔽材料能達到(30~40)dB以上衰減量的屏蔽效果時,就是實用、可行的。
由于電子技術應用廣泛,而且各種干擾設備的輻射很復雜,要完全消除電磁干擾是不可能的。但是,根據電磁兼容性原理,可以采取許多技術措施減小電磁干擾,使電磁干擾控制到一定范圍內,從而保證系統或設備的兼容性,例如,通信系統**初設計時,就應該嚴格進行現場電波測試,有針對性地選擇頻率及極化方式,避開雷達、移動通信等雜波干擾;高壓線選擇路徑時,應盡量繞開無線電臺(站)或充分利用接收地段的地形、地物屏蔽;接收設備與工業干擾源設備適當配置,使接收設備與各種工業干擾源離開一定距離;在微波通信電路設計中,為了減少干擾,可采用天線高低站方式調整微波電路反射點,并利用山頭阻擋反射波,使之不能對直射波形成干擾。另外,微波鐵塔是獨立的高大建筑物,應采用完善的接地、屏蔽等避雷措施。#p#分頁標題#e#
電磁兼容性是電子設備或系統**重要性能之一。電子設備的電磁兼容性設計是一項復雜的技術任務。它不存在**的解決方法。電磁兼容技術設計面很廣,電磁兼容*域也正在發展,重要的是掌握有關電磁兼容的基本原理,認真分析和實驗,選擇合適的解決問題的方法,就能實現EMC的要求。
超聲波的空話效應是指存在與液體中的微小泡核在超聲波作用下,經歷超聲的稀疏相和壓縮相,體積生長、收縮、再生漲、再收縮,多次周期性震蕩,**終高速度崩裂的動力學過程。此過程發生時間極端,旗袍內的氣體受壓后急劇升溫,在其周期性震蕩特別是崩潰過程中,會產生瞬態的極大的高溫、高壓,并使氣泡內的氣體和液體界面的介質裂解。**近研究表明,空化反應主要發生在100~1000kHz的中等頻率范圍內,而1MHz以上的高頻,液體中聲波產生的微射流和氣泡較穩定,不會破碎。
再換共方面,超聲波主要應用在清洗過程和催化過程中,其原理是超聲波發生空化時,會產生很高的流體剪切力。
在清洗方面的應用:
草聲波空化在除油去污方面有著非常廣泛的作用。氣泡在被壓縮崩潰時產生的高溫高壓沖擊波減小了污垢魚被清洗件之間的粘著力,引起污垢的破壞和脫離;同時氣泡還可“鉆入”縫隙和裂縫中震動,使污垢脫落,因此適用于形狀復雜零件的清洗。
在催化過程中的應用
由于空話產生高溫高壓同時伴隨著強烈的沖擊波和速度將進400km/h的微射流,對液—固非均相催化體系起到很好的沖擊作用,其影響包括以下幾個方面:1 沖擊波和微射流可不斷清洗剝除催化劑表面吸附的反應物和雜質,強烈時則可侵蝕固體表面;2 導致分子間強烈的相互碰撞和聚集,是催化的結構、組成級反映活性產生顯著的變化;3 強化傳質過程。做一,超聲波加快了化學反應的進程。
超聲波在水處理中的應用
超聲波輻射可在液體中產生獨特的物理化學效應,它集**氧化、焚燒和超臨界氧化等多種水處理級數特點與一身,同時伴有殺菌消毒功效,切操作簡單方便,降解速度快,可單獨活與其他工藝聯合,在水處理上**應用潛力。
對含有機物廢水的處理
超聲技術可用于處理各種難降解的廢水,目前以用于單環芳香族化合物,多環芳烴,酚類,氯化烴、氯代化烴、有機酸、染料、醇類、酮類等多種物質的研究,并取得良好的效果。
飲用水處理
我G飲用水水源25%是湖泊水和水庫水,20世紀90年代后,水體富營養化現象日益嚴重,水華發生的頻率和嚴重程度呈迅猛增加趨勢。所以有必要對水體污染嚴重的地區的應用水進行超聲波預處理。超聲波對藻類均按一級反應動力學進行,具有較好的去除效果,高頻率超聲波能夠加快藻類去處的反應速度。
超聲波技術比光,熱,化學等方法消毒更直接,可以和消毒劑一起使用,對自來水進行消毒,而大大減少了消毒劑用量。如大齡搖蚊幼蟲對常規的消毒劑氯氣、臭氧、雙氧水有很強的抵抗力,南方一些自來水廠研究發現超聲波可以有效去除水廠里的搖蚊幼蟲。
超聲波在污泥處理中的應用
對污泥脫水性能的影響
超聲波能夠明顯改善污泥絮凝脫水性能,是污泥減量化的重要原因。超聲波是污泥中的流態介質顆粒沉降性提高,同時改變了污泥的粘性和帶電狀況,破壞了污泥的膠體絮體結構,使污泥粘滯性及顆粒的邊界層效應降低,是污泥顆粒的有效碰撞增強,有效降低污泥中的結合水,從而改善了污泥的過濾性,是污泥比阻降低,上述作用軍事污泥更易于脫水。
超聲降解技術對各類有機物污水、飲用水、污泥,具有廣泛的適用性,它可以單獨使用,也可以與其他水處理技術聯合使用,只要條件合適,有機物可以被徹底礦化為二氧化碳和無機離子。它是一種環境友好的水處理技術,具有良好的發展和應用前景。
超聲清洗是功率超聲**大的一個分支,其機理研究及設備開發與清洗工藝研究及應用在我G已有近50年的歷史,幾乎是與G外同步進行的。現在隨著改革開放的深入和G民緊急的飛速發展,以及科技的不斷進步,超聲清洗技術的研究得到了迅速發展,出現了一些新的特點。
一直以來,聲空化被認為是超聲清洗的主要動力,現在發現用1MHz左右甚**3MHz的高頻進行清洗時,主要機制不是空化,而是高頻壓力波的沖洗作用。此時由于頻率太高,聲波在清洗液中很難發生空話,其清洗原理一般認為主要由于聲壓梯度、粒子速度及聲流的作用。
聲空化的單泡理論已有比較堅實的基礎,但現在發現在許多實際系統中,空泡不能表現出通過單泡理論建立的單個的實體模型,整個空化泡數目影響著空化效應以及聲場。故而有提出了空化結構的概念,之處空化泡所受的力。空化結構之的是有一些大小相同,速度各異且自身也在震蕩的空化泡的非均勻集聚所形成的結構。
更多的研究超聲波慶忌的一些磁效應溫度是影響超聲清洗質量
的一個重要因素,而空化泡閉合時會產生局部高溫高壓,似的清洗液的溫度不斷升高,溫度升高,空化核增多對產生空化有利,清洗效果差。
超聲清洗中,清洗劑是必不可少的,清洗的效果,質量與清洗劑有很大關系。在一定濃度范圍內,超聲輻照會引起流體的表面張力降低,雖然其影響程度和試樣溶液的濃度及其物理化學性質有關,但其表面張力都分別在某一濃度上降低到**小。#p#分頁標題#e#
超聲清洗過程中會產生空化噪聲,長期處于這種工作環境中的工作人員,可能會引起健康狀況下降,工作能力降低等。
超聲波在防垢方面雖然有一定發展,但還不進完善,而且是應用發展較快,理論發展比較滯后。如由超聲波和化學試劑結合而發展的聲化學防垢,其理論需要更進一步的發展,以便指導應用。又如何影響放狗效果的個因素的研究等等。
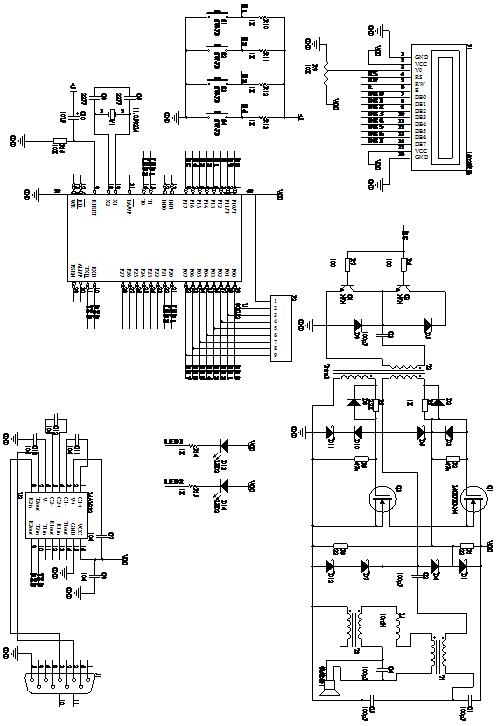
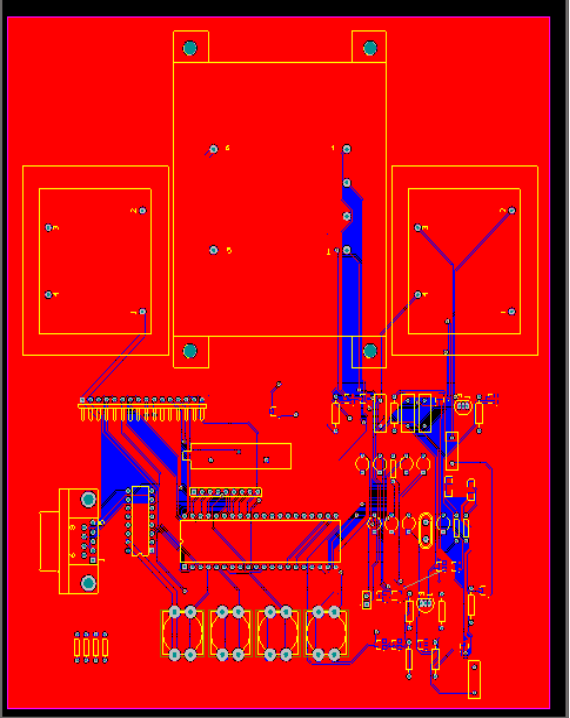
附錄C 系統設計原理圖及PCB圖
附錄D 程序清單
#include <reg52.h> //器件配置文件
#include<stdio.h> //標準輸入輸出
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define Data P0//數據端口
sbit on_stop=P1^6;
sbit up=P1^4;
sbit down=P1^5;
sbit menu=P1^3;
sbit RS = P1^0; //Pin4
sbit RW = P1^1; //Pin5
sbit E = P1^2; //Pin6
sbit led_35w=P2^0;
sbit led_60w=P2^1;
sbit chaoshengbo=P1^7;
uint flag_1s=0;
uint second=0;
uint minute=5;
uchar dingshi_time=1;
uchar power_flag=1;
uchar on_off_flag=0;
char data TimeNum[]=" ";
char data Test1[]=" ";
uint sudu_time=350;
/******************************************************************/
/* 函數聲明 */
/******************************************************************/
/******************************************************************/
/* 微秒延時函數 */
/******************************************************************/
void DelayUs(unsigned char us)//delay us
{
unsigned char uscnt;
uscnt=us>>1; /*12MHz頻率*/
while(--uscnt);
}
/******************************************************************/
/* 毫秒函數聲明 */
/******************************************************************/
void DelayMs(unsigned char ms)
{
while(--ms)
{
DelayUs(250);
DelayUs(250);
DelayUs(250);
DelayUs(250);
}
}
/******************************************************************/
/* 寫入命令函數 */
/******************************************************************/
void WriteCommand(unsigned char c)
{
DelayMs(5);//操作前短暫延時,保證信號穩定
E=0;
RS=0;
RW=0;
_nop_();
E=1;
Data=c;
E=0;
}
/******************************************************************/
/* 寫入數據函數 */
/******************************************************************/
void WriteData(unsigned char c)
{
DelayMs(5); //操作前短暫延時,保證信號穩定
E=0;
RS=1;
RW=0;
_nop_();
E=1;
Data=c;
E=0;
RS=0;
}
/******************************************************************/
/* 寫入字節函數 */
/******************************************************************/
void ShowChar(unsigned char pos,unsigned char c)
{
unsigned char p;
if (pos>=0x10)
p=pos+0xb0; //是第二行則命令代碼高4位為0xc#p#分頁標題#e#
else
p=pos+0x80; //是第二行則命令代碼高4位為0x8
WriteCommand (p);//寫命令
WriteData (c); //寫數據
}
/******************************************************************/
/* 寫入字符串函數 */
/******************************************************************/
void ShowString (unsigned char line,char *ptr)
{
unsigned char l,i;
l=line<<4;
for (i=0;i<16;i++)
ShowChar (l++,*(ptr+i));//循環顯示16個字符
}
/******************************************************************/
/* 初始化函數 */
/******************************************************************/
void InitLcd()
{
DelayMs(15);
WriteCommand(0x38); //display mode
WriteCommand(0x38); //display mode
WriteCommand(0x38); //display mode
WriteCommand(0x06); //顯示光標移動位置
WriteCommand(0x0c); //顯示開及光標設置
WriteCommand(0x01); //顯示清屏
}
/******************************************************************/
/* 延時函數 */
/******************************************************************/
void Delay(unsigned int i)//延時
{
while(--i);
}
/******************按鍵消抖**************************/
void xiaodou()
{
Delay(5000);
Delay(5000);
Delay(5000);
Delay(5000);
Delay(5000);
Delay(5000);
Delay(5000);
Delay(5000);
Delay(5000);
}
/******************定時模式case**************************/
void dingshi_time_cases()
{
switch(dingshi_time)
{
case 1:
sprintf(TimeNum,"1 minute ");//打印輸出第二行信息
ShowString(1,TimeNum);
minute=1;second=0;
break;
case 2:
sprintf(TimeNum,"2 minutes ");//打印輸出第二行信息
ShowString(1,TimeNum);
minute=2;second=0;
break;
case 3:
sprintf(TimeNum,"5 minutes ");//打印輸出第二行信息
ShowString(1,TimeNum);
minute=5;second=0;
break;
case 4:
sprintf(TimeNum,"10 minutes ");//打印輸出第二行信息
ShowString(1,TimeNum);
minute=10;second=0;
break;
}
}
/******************功率模式case**************************/
void power_cases()
{
switch(power_flag)
{
case 1:
sprintf(TimeNum,"35 W ");//打印輸出第二行信息
ShowString(1,TimeNum);
break;
case 2:
sprintf(TimeNum,"60 W ");//打印輸出第二行信息
ShowString(1,TimeNum);
break;
}
}
/*********************************************************/
void main( void )
{
uchar menu_flag=0;
TMOD=0x12;
EA=1;
TR1=1;
TR0=1;
ET0=1;
TH0=0xED;
TL0=0xED;
//ET1=1;
TH1=0x4C;
TL1=0x00;
InitLcd(); //初始化LCD
DelayMs(15); //延時保證液晶信號穩定
sprintf(Test1,"Welcome! "); //打印輸出**行信息
ShowString(0,Test1);
sprintf(TimeNum,"Please set up! ");//打印輸出第二行信息
ShowString(1,TimeNum);
while(1)
{
if(on_off_flag==0)
{
if(menu==0)
{
while(1)
{
if(menu==0)
{
xiaodou();
menu_flag++;
if(menu_flag==1)
{
sprintf(Test1,"ding shi time: "); //打印輸出**行信息
ShowString(0,Test1);
dingshi_time_cases();
}
if(menu_flag==2)
{
sprintf(Test1,"Select power: "); //打印輸出**行信息
ShowString(0,Test1);
power_cases();
}
if(menu_flag==3)
{
menu_flag=0;
sprintf(Test1,"Press the button"); //打印輸出**行信息
ShowString(0,Test1);
sprintf(Test1,"to start! "); //打印輸出**行信息
ShowString(1,Test1);
break;
}
}
if(up==0)
{
xiaodou();
if(menu_flag==1)
{
dingshi_time++;
if(dingshi_time==5)
{
dingshi_time=4;
}
dingshi_time_cases();
}
if(menu_flag==2)
{
power_flag++;
if(power_flag==3)
{#p#分頁標題#e#
power_flag=2;
}
power_cases();
}
}
if(down==0)
{
xiaodou();
if(menu_flag==1)
{
dingshi_time--;
if(dingshi_time==0)
{
dingshi_time=1;
}
dingshi_time_cases();
}
if(menu_flag==2)
{
power_flag--;
if(power_flag==0)
{
power_flag=1;
}
power_cases();
}
}
}
}
}
if(on_stop==0)
{
xiaodou();
on_off_flag++;
if(on_off_flag==1)
{
ET1=1;
if(power_flag==1)
{
sprintf(TimeNum,"Power:35 W ");//打印輸出**行信息
ShowString(0,TimeNum);
led_35w=0;
led_60w=1;
}
if(power_flag==2)
{
sprintf(TimeNum,"Power:60 W ");//打印輸出**行信息
ShowString(0,TimeNum);
led_35w=1;
led_60w=0;
}
if(second<10)
sprintf(Test1,"%d%c%c%d%s",minute,':','0',second," "); //打印輸出第二行信息
else
sprintf(Test1,"%d%c%d%s",minute,':',second," "); //打印輸出第二行信息
ShowString(1,Test1);
}
if(on_off_flag==2)
{
on_off_flag=0;
led_35w=1;
led_60w=1;
sprintf(TimeNum,"Stop! ");//打印輸出第二行信息
ShowString(0,TimeNum);
sprintf(TimeNum,"Stop! ");//打印輸出第二行信息
ShowString(1,TimeNum);
ET1=0;
}
}
}
}
//-------------------------------------------------
void time_50ms() interrupt 3
{
TH1=0x4C;
TL1=0x00;
flag_1s++;
if(flag_1s==200)
{
flag_1s=0;
//second=second-10;
if(second<=0)
{
if(minute!=0)
{
second=60;
minute--;
}
else
{
second=0;
}
}
if(second!=0)
second=second-10;
if(second<10)
sprintf(Test1,"%d%c%c%d%s",minute,':','0',second," "); //打印輸出第二行信息
else
sprintf(Test1,"%d%c%d%s",minute,':',second," "); //打印輸出第二行信息
ShowString(1,Test1);
if((minute==0)&&(second==0))
{
ET1=0;
sprintf(Test1,"Set up again "); //打印輸出**行信息
ShowString(0,Test1);
sprintf(Test1,"Or stop! ");//打印輸出第二行信息
ShowString(1,Test1);
}
}
}
//-------------------------------------------------
void time_25kHz() interrupt 1
{
chaoshengbo=~chaoshengbo;
}
//-------------------------------------------------
附錄E 元器件清單
|
Comment |
Designator |
Footprint |
Quantity |
|
|
C1, C2, C3, C4, C5 |
RAD-0.3 |
5 |
|
Cap |
C6, C7, C8, C9, C11, C12, C13 |
CAPR5-4X5 |
7 |
|
Cap Pol2 |
C10 |
CAPR5-4X5 |
1 |
|
|
D1, D2, D3, D4, D5, D6, D7, D8, D9, D10, D11, D12 |
SOT-23 |
12 |
|
LED2 |
D13, D14 |
3.2X1.6X1.1 |
2 |
|
D Connector 9 |
J1 |
DSUB1.385-2H9 |
1 |
|
Inductor |
L1 |
0402-A |
1 |
|
1602液晶 |
P1 |
HDR1X16H |
1 |
|
Header 9 |
P2 |
HDR1X9 |
1 |
|
MOSFET-N4 |
Q1 |
SOT-343 |
1 |
|
NPN |
Q2, Q4 |
TO-226 |
2 |
|
|
Q3 |
SOT-343 |
1 |
|
Res2 |
R1, R2, R3, R4, R5, R6, R7, R8 |
AXIAL-0.4 |
8 |
|
es Tap |
R9 |
VR3 |
1 |
|
|
R10, R11, R12, R13, R14, R15 |
AXIAL-0.3 |
6 |
|
Res2 |
R16 |
AXIAL-0.3 |
1 |
|
SW-PB |
S1, S2, S3, S4 |
KEY |
4 |
|
|
T1, T3 |
TRF_4 |
2 |
|
Trans3 |
T2 |
TRF_6 |
1 |
|
80C52 |
U1 |
DIP40 |
1 |
|
MAX232 |
U2 |
DIP-16 |
1 |
|
11.0592M |
Y1 |
XTAL1 |
1 |
|
|
換能器1 |
PIN2 |
1 |
#p#分頁標題#e#
附錄F 系統設計實物圖